ICRA has a unique sewer-mimicking experimental installation that
consists of a specially designed laboratory and pilot plant
system that reproduces the main characteristics of sewers within
its experimental halls. The pilot plant is basically a direct
connection-extension of the sewer network of Girona that finishes
inside the laboratories of ICRA. The greatest advantage is that
permits to work with real sewage but under completely controlled
operation conditions such as feed pump frequencies, hydraulic
retention times, temperatures, contrary to field-scale sewers,
where natural variability tends to difficult in-depth
investigations.
EURECAT’s facilities located in Cerdanyola del
Vallès include a Robotics and Industrial Automation Laboratory of
500m2, specifically equipped for the design, development,
manufacture, and installation of robotic/mechatronic equipment;
and an advanced manufacturing laboratory (300 m2) equipped for
designing and manufacturing all kind of tools and mechanical
elements. This includes 4 realistic robotic industrial cells with
several industrial and collaborative robots, and Artificial
Vision Laboratory, a lab to develop collaborative applications
and a 100m2 ground/aerial robot test arena equipped with a Motion
tracking system (Optitrack).
FACSA makes its laboratories,
support equipment, hardware, and software (commercial licenses)
available to the project to accomplish both the experimental and
modelling tasks, mainly in WP2, WP3, and WP6. FACSA has several
laboratories where it evaluates the quality of the water. For
this project, it will be used to conduct laboratory experiments
mainly through physical-chemical water. analysis and H2S
measurements. The materials and equipment used are diverse:
jar-test bench, respirometers, digesters, flasks, microscopes,
fluorimeters, etc. It is this equipment and facilities that FACSA
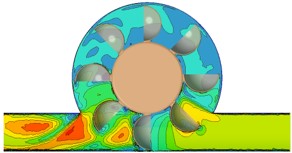
will have available to carry out the project. With regards to
modelling equipment for CFD simulations FACSA has licenses for
CAD: SpaceClaim v19.2 and CFD: Ansys v19.2 and advanced
computational installations including a CAD Workstation for CAD
design, a high-performance computing cluster for scientific
calculations